|
3. Stabilizatör çapının hesaplanması
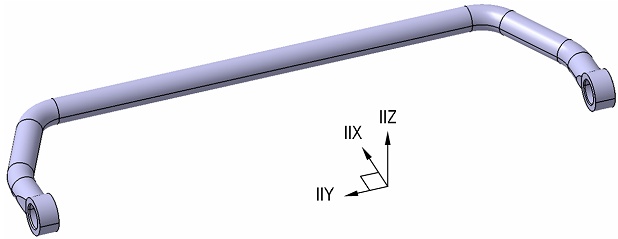
Stabilizatör çapı, bacak yataklarına indirgenmiş yay katsayısı cS' üzerinden, Şekil 14'te görülen temel boyutlar üzerinden hesaplanmıştır. Bu boyutlar, gövde iskeleti elemanları ve aks yapı elemanlarının Şekil 2'de görülen konumları dikkate alınarak belirlenmiştir. Uygulamada, stabilizatörler genellikle aksa ve gövdeye H-H' ve F-F' noktalarından elastik elemanlar yardımıyla yataklanmaktadır. Viraj hareketi sırasında bu elemanların şekil değişimi ne kadar fazla olursa, bacakların elastik şekil değişimi de o ölçüde azalmaktadır.
Şekil 14. Stabilizatör boyutları
Bu da stabilizatörün burulma direnç momenti oluşturma kapasitesinden tam olarak yararlanılamaması anlamına gelir. Dolayısıyla, istenen stabilizatör katsayısının elde edilebilmesi için ilk hesaplanan cS' değerinin, düzeltme faktörü bg ile birlikte değerlendirilerek belirli oranda artırılması gerekir. Yatak elastisitesi dikkate alınarak hesaplanan yeni stabilizatör katsayısı cS;
 (16) (16)
şeklinde bulunmaktadır. bg Düzeltme faktörü, çeşitli yataklama tipleri için ilgili literatürden elde edilebilmektedir. Şekil 14'te görülen yataklama düzeni için bg= 0,86 alınması önerilmektedir [1,14]. Stabilizatör çapı d0, elde edilen yeni katsayı ve parça boyutları üzerinden;
 (17) (17)
bağıntısı uyarınca, d0= 50 mm olarak hesaplanmıştır [1, 14]. Bulunan bu değere göre CATIA® V5R15 paketi yardımıyla oluşturulmuş katı model Şekil 15'te görülmektedir.
Şekil 15. Stabilizatörün katı modeli
4. GERİLME ANALİZİ
Çapı belirlenen stabilizatörün mukavemet analizi, taşıtın tutunma sınırlarında yapacağı varsayılan bir viraj dönüşü sırasında, bacaklarda ortaya çıkacak şekil değişimi üzerinden gerçekleştirilmiştir. Yol-tekerlek arası yan kuvvet bağıntı katsayısının ortalama, µS 0,5 kabul edilmesi durumunda taşıt, aq 5 m/s^2 gibi oldukça yüksek bir yanal ivmede savrulma sınırına gelmekte ve bu durumda Şekil 13 üzerinden 0,5 kabul edilmesi durumunda taşıt, aq 5 m/s^2 gibi oldukça yüksek bir yanal ivmede savrulma sınırına gelmekte ve bu durumda Şekil 13 üzerinden  3º olarak bulunmaktadır. Böylece (15) bağıntısı yardımıyla, 3º olarak bulunmaktadır. Böylece (15) bağıntısı yardımıyla,  = 5,46º ve z1= z2= 30 mm değerleri elde edilmektedir. Şekil 16'da, aq=5(m/s2)'lik yanal ivme için gövdenin YZ düzlemindeki hareketi görülmektedir. = 5,46º ve z1= z2= 30 mm değerleri elde edilmektedir. Şekil 16'da, aq=5(m/s2)'lik yanal ivme için gövdenin YZ düzlemindeki hareketi görülmektedir.
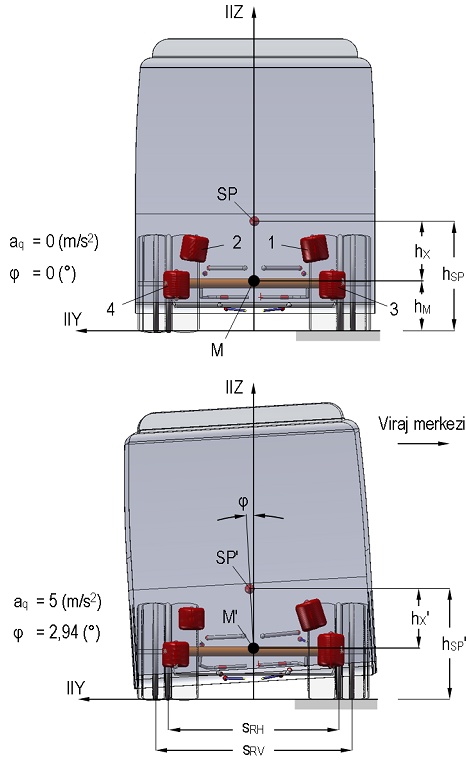
Şekil 16. Taşıt gövdesinin aq: 5 m/s2 yanal ivme için yalpa simülasyonu
Hazırlanan katı model, gerilme analizinin gerçekleştirilmesi amacıyla ANSYS® Workbench V11.0 ticari sonlu elemanlar yazılımına aktarılmıştır. Stabilizatörün sonlu elemanlar modeli Şekil 17'de verilmiştir. Bu modelde her biri üçer doğrusal serbestlik derecesine sahip toplam on düğümden oluşan SOLID187 elemanı kullanılmıştır [15]. Sonlu elemanlar modeli, 74.360 eleman ve 131.971 düğümden oluşmaktadır. Stabilizatör gövdesi, H-H' ve F-F' yatak elemanlarıyla, bu elemanlar içinde/üzerinde dönebilecek ve Y doğrultusunda sınırlı olarak öteleme yapabilecek şekilde ilişkilendirilmiştir. Bacak yatakları her üç eksende de serbest bırakılmıştır. Modelde, yatak elemanlarının kauçuk esaslı oldukları varsayılmıştır. Elemanların elastisite modülü, kauçuk için kabul edilen Emaks= 0,1 GPa ve Poisson oranı, kauçuk esaslı malzemeler için öngörülen v 0,5 değerleriyle dikkate alınmıştır [16, 17]. Analizde, yatakların sınırlı şekil değişimleri için malzeme özellikleri lineer izotropik olarak tanımlanmıştır.
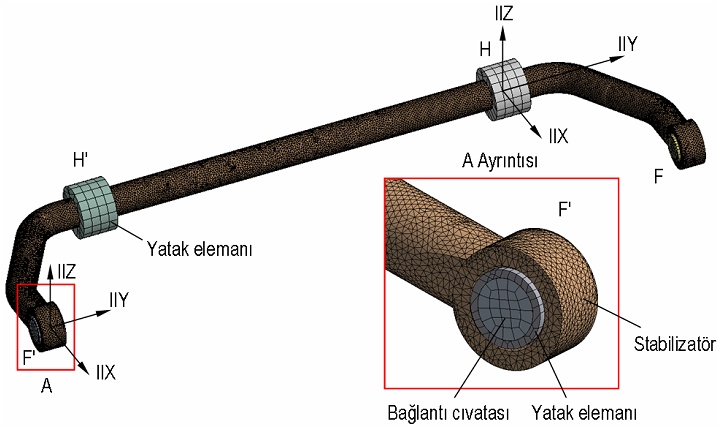
Şekil 17. Stabilizatörün sonlu elemanlar modeli
Stabilizatörün imalatında yüksek zorlanmalara uygun, ıslah edilebilir 50CrV4 (51CrV4) yay çeliğinin kullanılması öngörülmektedir. Bu malzemenin ıslah edilmiş durumdaki mekanik özellikleri Tablo 3'te verilmiştir [18].
Tablo 3. 50CrV4 (51CrV4) malzemesinin mekanik özellikleri [18]
Standart |
EN 10 083 |
Malzeme numarası |
1.8159 |
Elastisite modülü, E |
200 GPa |
Poisson oranı, v |
0,3 |
Akma sınırı (en az), Re |
800 MPa |
Çekme dayanımı (en az), Rm |
1000 MPa |
Analiz için, F ve F' bacak yataklarına, Şekil 17'de görüldüğü gibi, Z doğrultusunda ve birbirine ters yönde z1= z2 = 30 mm sehim verilmiştir. Stabilizatör gövdesindeki elastik şekil değişimi dağılımı Şekil 17'de görüldüğü gibidir.
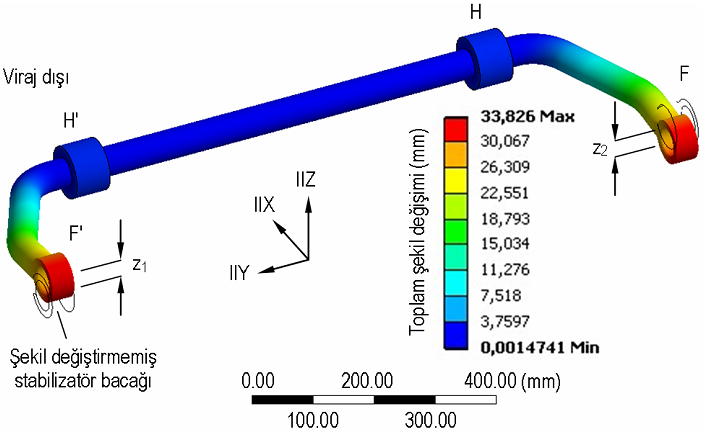
Şekil 17. Stabilizatör gövdesinde elastik şekil değişimi
Yapılan analiz sonucunda elde edilen gerilme dağılımı Şekil 18'de görülmektedir. Buna göre, eşdeğer von Mises gerilmesinin sırt bölgesinde  = 490-510 MPa aralığında kaldığı, H ve H' yataklarının bacak tarafında ise maksimum maks 606 MPa değerine kadar yükseldiği belirlenmiştir. Bu da malzemenin akma sınırının %76'sına tekabül etmektedir. Parça genelinde en düşük emniyet katsayısı n= 1,32 olarak hesaplanmıştır. = 490-510 MPa aralığında kaldığı, H ve H' yataklarının bacak tarafında ise maksimum maks 606 MPa değerine kadar yükseldiği belirlenmiştir. Bu da malzemenin akma sınırının %76'sına tekabül etmektedir. Parça genelinde en düşük emniyet katsayısı n= 1,32 olarak hesaplanmıştır.
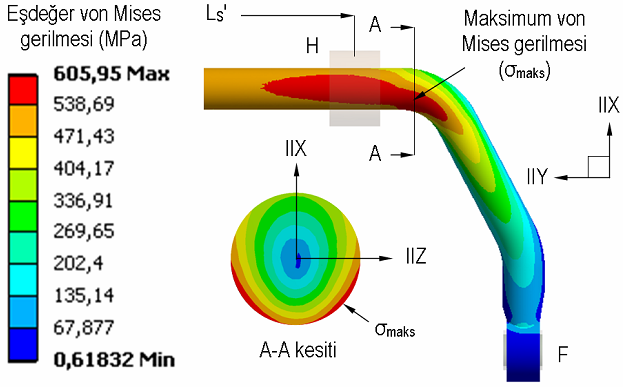
Şekil 18. aq: 5 m/s2 yanal ivme için stabilizatör gövdesinde gerilme dağılımı
Bununla birlikte, Şekil 4 üzerinden görülebileceği gibi, hava yayının belirli bir değerin üzerindeki sıkışmasında devreye giren lastik takoz, yayın karakteristiğini önemli ölçüde progresif bir hale getirmekte, bu da aksların yalpa direncini artırmaktadır. Oluşturulan taşıt modelinde bu durum ihmal edilmiş ve yay karakteristiği, çalışma aralığında lineer kabul edilmiştir. Bu nedenle taşıtın, aq= 5 m/s2 gibi oldukça yüksek bir yanal ivmeyle gerçekleştireceği viraj hareketi sırasında ortaya çıkacak yalpa açısı ile bacak sehiminin, matematik modelden hesaplanan ve simülasyondan elde edilen değerlerin altında olması beklenmelidir. Dolayısıyla, stabilizatörün sırt bölgesı ve kritik kesitinde ortaya çıkacak gerilmelerde belirli ölçüde azalma öngörülebilir. Bu da, en kritik hareket durumunda emniyet katsayısının, hesaplanan 1,32 değerinden daha yüksek olması anlamına gelir. Sonuç olarak parçanın, öngörülen en yüksek yükleme değeri için mukavemet koşullarını sağladığı söylenebilir.
5. Sonuç
Tasarım aşamasındaki bir yolcu otobüsünün bilinen teknik verileri ışığında, süspansiyon sisteminde kullanılması düşünülen stabilizatörün çap hesabı ve mukavemet analizi yapılmıştır. Bunun için önce, yaylandırma elemanı olarak yalnızca hava yaylarının kullanıldığı başlangıç durumunda eşdeğer burulma yayı yaklaşımı kullanılarak, taşıtın basit bir matematik modeli kurulmuş ve artan santrfüj ivme değerleri için gövdenin yalpa eğilimi belirlenmiştir. Modelde, yalpa açısındaki artışın, aksların yalpa merkezi konumlarına etkimediği varsayılmıştır. Daha sonra basitleştirilmiş bir dinamik simülasyon modeli oluşturularak, karoserinin yalpa ekseni çevresindeki dönme hareketi sırasında, aks ve taşıt gövdesini bağlayan askı kollarındaki konum değişimlerinin yalpaya etkisi araştırılmıştır. Her iki modelden oldukça yakın sonuçlar elde edilmiştir. Bu nedenle, ilk modelde uygulanan sabit yalpa merkezi kabulünün yeterli bir yaklaşım olduğu söylenebilir. Literatürde önerilen yalpa açısı sınırlamalarının sağlanabilmesi için ön aks konstrüksiyonuna eklenmesi gereken stabilizatörün burulma yay katsayısı belirlenmiştir. Bu değeri verecek stabilizatör çapı hesaplanmış ve taşıtın kritik viraj dönüşü için parçanın bacak bölgelerinde meydana gelecek sehim miktarı bulunmuştur. Bu elastik şekil değişimi, sonlu elemanlar yöntemi kullanılarak simüle edilmiş ve parçanın gerilme analizi yapılmıştır. Seçilen çapın mukavemet açısından yeterli olduğu belirlenmiştir.
Taşıt süspansiyon sistemlerine stabilizatör eklenmesi, viraj hareketi sırasında düşey tekerlek yükü değişimini artıracağından, tekerleğin yol düzleminde tahrik/fren kuvveti ve yan kuvvet taşıma kapasitesinin değişmesi gündeme gelmektedir. Bu durum, tekerleklerin diyagonal hareketini ve dolayısıyla taşıtın özgül yönlenme davranışını değiştirmekte, doğrultu kontrol ve stabilizasyon özelliklerine doğrudan ve dolaylı olarak etkimektedir [19]. Şekil 19'da, ön ve arka aksında stabilizatör bulunan bir taşıtın viraj dönüşü sırasında, farklı burulma sertlikleri için direksiyon açısı ihtiyaçları karşılaştırılmıştır [20]. Buna göre, ön aks stabilizatörünün arka aksta bulunandan sert olması durumunda, taşıtı aynı çaplı virajda tutmak için direksiyon simidine verilen açı, her iki akstaki stabilizatörün eşit sertliğe sahip olması durumuna göre artar. Bu da taşıtın az döner (understeer) karakteristiğe sahip olması yani virajın dışına doğru sapma eğilimi taşıması anlamına gelir. Taşıtın yalnızca ön aksına stabilizatör eklenmesi durumunda da özgül yönlenme davranışında belirli ölçüde bir değişimin ortaya çıkması beklenir. Stabilizatörün mekanik tasarımında takip edilebilecek bir yöntemin açıklanması ve gerçek bir ağır taşıta uygulanması ile sınırlandırılmış bu çalışmada, seçilen katsayının, taşıtın özgül yönlenme davranışına etkisi kapsam dışında tutulmuştur. Süspansiyon sistemi tasarımında bu noktanın da gözden uzak tutulmaması gerekir. Yay ve stabilizatör seçimi yapıldıktan sonra, lastik tekerlek için uygun bir matematik modeli de içeren daha kapsamlı modeller kullanılarak taşıtın özgül yönlenme davranışı değerlendirilmelidir. Sonuçta, stabilizatör katsayısı ve çapının belirlenmesi, taşıtın hem yanal hem de yol düzlemindeki dinamik davranışlarının bir arada incelendiği bir optimizasyon problemi halini almaktadır.
Şekil 19. Ön ve arka aks stabilizatör sertliklerinin virajda direksiyon açısı
ihtiyacına etkisi (cSV: Ön aks, cSH: Arka aks, µH: Tutunma katsayısı) [19]
Teşekkür
Yazarlar, katkılarından dolayı, Makine Müh. Gediz Kulaç ve Makine Müh. Hasan Günal'a teşekkür eder.
Kaynakça
- Kuralay NS, 2008. Motorlu Taşıtlar; Temel ve Tasarım Esasları, Yapı Elemanları, Cilt 1; Tahrik ve Sürüş Sistemleri, TMMOB Makina Mühendisleri Odası, Yayın No: MMO/2008/484, İzmir, s.165, 205
- Schiehlen W, 1982. Introduction to Vehicle Dynamics, Dynamics of High - Speed Vehicles, International Centre for Mechanical Sciences, Courses and Lectures, No. 274, Springer - Verlag, Wien - New York, s.3-12
- Blundell M, Harty D, 2004. The Multibody Systems Approach to Vehicle Dynamics, Elsevier Buterworth-Heinemann, Norfolk, s.333, 425
- Continental Luftfederbälge, Firmenschrift, November 1977, s.11
- Pahl HJ, Luftfedern in Nutzfahrzeugen, Auslegung-Berechnung-Praxis, Firmenschrift, Luftfedertechnik (LFT) Germany GmbH / AKTAŞ Group, Dormagen, s.77
- Bastow D, 1990. Car Suspension and Handling, Pentech Press, London, s.53
- Mitschke M, 1972. Dynamik der Kraftfahrzeuge, Springer Verlag, Berlin, s.418
- Milliken WF, Milliken DL, 1995. Race Car Vehicle Dynamics, Society of Automotive Engineering, Inc., Warrendale, PA, s.648
- Genta G, 1997. Motor Vehicle Dynamics, Series on Advances in Mathematics for Applied Sciences-Vol.43, World Scientific Publishing Co. Pte. Ltd., Singapore, s.344
- Matschinsky W, 1968. Die Vierpunktig Geführte Starrachse, ATZ 70, Nr.1, s.9-12
- Reimpell J, 1976. Fahrwerktechnik Bd. 1, Vogel-Verlag, Würzburg, s.164
- Matschinsky W, 2007. Radführungen der Straßenfahrzeuge, 3. aktualisierte und erweiterte Auflage, Springer-Verlag, Berlin Heidelberg, s.101
- v.Estorff HE, Technische Daten Fahrzeugfedern Teil 3: Stabilisatoren, Eine Veröffentlichung der Abteilung "Forschung und Entwicklung" der Stahlwerke Brüninghaus GmbH, Stahlwerke Brüninghaus GmbH, Ausgabe September 1969, s.91
- Reimpell J, 1973. Fahrwerktechnik Bd. 2, Vogel-Verlag, Würzburg, s.262, 271
- ANSYS Theory Reference, 2005. ANSYS Release 10.0, ANSYS, Inc.
- Ashby MF, Jones DRH, 1980. Engineering Materials, an Introduction to their Properties and Applications, Pergamon International Library, International Series on Materials Science and Technology, vol.34, Pergamon Press, Oxford, s.31
- Rinde JA, 1970. Poisson's ratio for rigid plastic foams, J. Applied Polymer Science, 14, pp.1913-1926
- Yüksel M, 2003. Malzeme Bilimleri Serisi-Cilt 1: Malzeme Bilgisi, TMMOB Makina Mühendisleri Odası, Yayın No: MMO/2003/271/2, Ankara, s.360
- Çalışkan K, Ünlüsoy YS, Dağ S, 2004. Otomobil Denge Çubuğu için Otomatik Tasarım Analizi, OTEKON'04 - 2. Otomotiv Teknolojileri Kongresi, 21-23 Haziran 2004, Uludağ Üniversitesi Mühendislik Mimarlık Fakültesi, Makine Mühendisliği Bölümü, Bursa, Kongre Kitabı, s. 205-212.
- Zomotor A, 1987. Fahrwerktechnik: Fahrverhalten, Vogel Verlag, Würzburg, s. 15
|
