|
Arş.
Gör. Burak
Veli GÖRÜR, Arş.
Gör. Anıl
Nomak AKDOĞAN,
Prof. Mehmet Emin YURCİ
Yıldız Teknik Üniv. Makine Fak. Makine Malzemesi ve İmalat
Teknolojisi Anabilim Dalı
MÜHENDİS
ve MAKİNA, Aralık 2003
GİRİŞ:
Endüstrinin
artan ihtiyaçlarını karşılamak üzere, 3D ölçme tekniklerine
olan ilgi ve işletmelerin bu konudaki yatırımları giderek
artmaktadır. Gerek mühendislik uygulamaları ve imalat prosesleri
gerekse endüstriyel tasarım ve ürün geliştirme faaliyetleri
hızlı, hassas ve kullanıcı dostu ölçme sistemlerine ihtiyaç
duymaktadır. Özellikle dijital görüntüleme teknikleri sayesinde
iş parçasına ait nokta verilerinin tek tek toplanması ile
imalat toleranslarını doğrulama, yeniden imal edilecek parçalar
için geometri belirleme ve deformasyon problemleri görüntüleme
gibi pek çok tersine mühendislik ve muayene işlemleri mümkün
olmaktadır (1).
Günümüz
CAD/CAM uygulamalarında çoğunlukla bilgisayar ile oluşturulan
üç boyutlu modelden hareket edilerek uygun CNC veri oluşturulması
yoluyla imalat aşamasına geçilmektedir. Buna alternatif bir
uygulama olarak "tersine mühendislik" diye tanımlanan
yöntem de mevcuttur. Esasen bu yöntemi genel anlamı ile ele
aldığımızda, elde mevcut olan mamul parçadan hareketle ve
imalat prosesindeki işlem sırasında geriye doğru gidilmek
suretiyle, operasyonların tümünün çözümlenmesine yönelik çalışmaların
bütünü olarak görmek gerekmektedir. Ancak, sanayimiz için
yeni sayılabilecek bu terim, uygulamalarda anlam itibarıyla
biraz kısıtlanarak elde bulunan bir modeli bir tarayıcı ile
taramak suretiyle oluşan verilerin uygun şekilde düzeltilip
yüzey haline getirilmesinden sonra CNC tezgahta işlemek için
uygun forma sokulma işlemi için kullanılmaktadır (2).
SAYISALLAŞTIRMA
ve TERSİNE MÜHENDİSLİK:
Üç
boyutlu sayısallaştırma işlemi, var olan fiziksel bir objenin
üç boyutlu bilgisayar modelini elde etme yöntemidir. Objeden
elde edilen ve henüz işlenmemiş olan bu bilgi, tersine mühendislik
yazılımları ve uygulamaları sayesinde ürün geliştirme sürecinin
ilerideki aşamaları için kullanılabilir hale getirilmektedir.
(2)
Tersine
mühendislik, 3D sayısallaştırma tekniklerini uygulamak suretiyle
bir iş parçasına ait nokta bulutu verilerinin toplanmasına
ve dolayısıyla CAD modelinin yaratılmasına olanak tanımaktadır.
Günümüzde, özellikle imalat proseslerinde karşımıza çıkan
problemlerin analizinde, tersine mühendislik uygulamalarına
yaygın olarak yer verilmektedir. Ayrıca, tasarımların modifikasyonu
ve yeniden gerçekleştirilmesi amacıyla, iş parçasının orijinal
CAD modeli ile ölçülen iş parçasının yaratılan CAD verisi
karşılaştırılmaktadır (3). Orijinal CAD
verisi ile bu veriye bağlı olarak imal edilmiş parçanın 3D
sayısallaştırma verisinin karşılaştırıldığı kalite kontrol
uygulamalarına da sıkça rastlanmaktadır. Karmaşık geometriye
sahip bir parçanın 3D CAD verisi çok hızlı ve hassas bir şekilde
elde edildikten sonra yazılımın ilgili modülleri kullanılarak
taranan parçanın tasarımı parametrik olarak yeniden yapılabileceği
gibi herhangi bir tasarım değişikliğine de gidilebilmektedir.(2)
OPTİK
ÖLÇME METODLARI ve SAYISALLAŞTIRMA:
|
|
|
Şekil
1. Sayısallaştırma Yöntemlerinin Sınıflandırılması
|
Optik
3D sayısallaştırma işlemleri, genellikle var olan bir objenin
3D modelini yaratmak, objeyi çok küçük detaylarına kadar modellemek
ve gerçek yapıyı 3D modeliyle ilişkili olarak haritalamak
gibi amaçlar için uygun düşmektedir.
İş
parçalarından sayısal veri toplamak amacıyla uygulanan teknikler
dokunmasız ve dokunmalı metotlar olmak üzere iki grupta incelenmektedir.
Dokunmasız metotlardan ızgara projeksiyonu ve laser ölçme
metodu en çok kullanılan optik veri toplama teknikleri olarak
tanınmaktadır. (Şekil 1)
|
|
|
Şekil
2. Izgara Projeksiyonu
|
Izgara
projeksiyonu metodu, siyah ve beyaz şeritler halindeki desenlerin
ölçülecek yüzey üzerine bir sıra halinde projeksiyonu temeline
dayanmaktadır. Bu desenler, bir LCD projektör vasıtasıyla
mümkün olduğunca eşit iki parçaya bölünen siyah ve beyaz çizgilerden
oluşmaktadır (3) (Şekil 2).
3D
Sayısallaştırma çözümlerinde, iş parçalarının yüksek çözünürlükteki
CCD kameralar vasıtasıyla çeşitli açılardan elde edilen görüntüleri
gelişmiş fotogrametri tekniklerini kullanan özel bir yazılım
ile IGES ve STL gibi üç boyutlu standart veri formatlarına
dönüştürülmektedir. Bu sistemler, yüksek hassasiyeti, kullanım
kolaylığı ve hızı ile dünya çapında başarılı bir şekilde kullanılmaktadır
(2).
CCD
kameralar bir video kamera türüdür. Film yerine, lensler arkasına
ışık yoğunluğunu elektronik sinyallere dönüştüren ve bunu
direkt bilgisayara transfer edebilen bir CCD (Charge Coupled
Device) chip yerleştirilmiş bulunmaktadır. CCD kamera, küçüklüğü,
hassasiyeti, sabitliği, düşük fiyatı ve uzun servis yaşamıyla
tercih gören bir donatımdır (4).
Basit
bir kullanım özelliğine sahip olan optik ölçme sistemleri,
az yer kaplamakta ve ölçme kafası ile birlikte oturaklı bir
yapı şekli göstermektedir. Yalnızca saniyeler süren bir tarama
işleminin ardından hassas bir veri kalitesi elde edilebilmektedir.
Özellikle son zamanlarda sağlanan gelişmeler sayesinde, söz
konusu hassasiyet derecesi giderek artış göstermektedir. Elde
edilen tarama verisi bütünüyle ve verimli olarak işlenebilmektedir.
Her bir ölçüm işleminin sonunda, veri bütünlüğü açısından
geri besleme alınabilmekte ve geometrik özellik (feature)
tespiti gerçekleştirilebilmektedir. Online görüntüleme yapılmak
suretiyle çekim sırasında parça veya kameranın titremesinden
oluşan hatalar anında tespit edilerek yazılım tarafından ölçümün
tekrarlanması tavsiye edilmektedir (5).
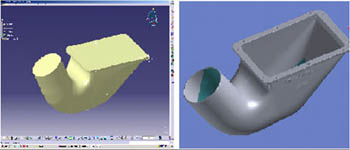
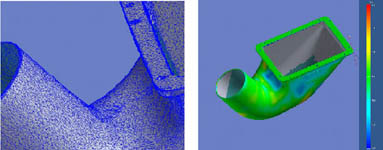
Yapılan
ızgara projeksiyonu uygulamasında, elde edilen sayısallaştırma
verisi, iş parçasının daha önceden çizilmiş CAD verisi, nokta
bulutunun mesh edilmiş hali ve renkli doku haritasının gösterildiği
görüntüler Şekil 3' te verilmektedir.
|
|
|
|
Şekil
3-a Parça CAD Verisi ile Ölçüm Verisinin Görüntüleri
|
Şekil
3-b Parçanın Mesh Edilmiş Görüntüsü ve Renkli Doku
Haritası
|
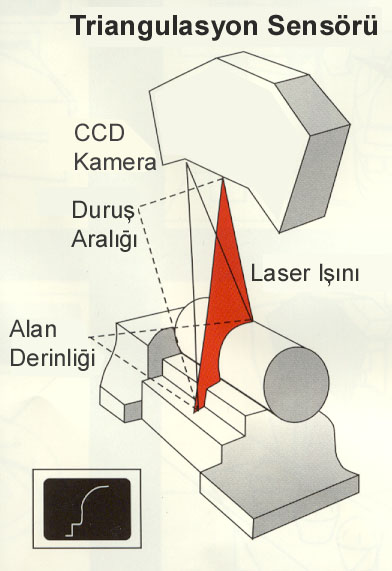
Dokunmasız
Laser tarama metodu, laser triangulasyonu prosesi ile çalışmaktadır.
Bu proseste, laser çizgisi sayısallaştırılacak yüzey üzerine
laser kafasından yaklaşık 2 ½ inç uzunluğunda projekte edilmektedir.
CCD
kameraları, laserden belli uzaklıkta olan parça üzerinden
yansıyan laser ışınının ışığını yakalamaktadır. Laser çizgisinin
X,Y,Z koordinatları trigonometrik olarak hesaplanabilmektedir.
Kullanılan
sensöre ve yazılım ayarlarına bağlı olarak, 650' den fazla
ve birbirinden bağımsız veri noktası tek bir laser çizgisinde
toplanabilmektedir. Taranmış obje bundan böyle, birkaçyüz
noktadan milyonlarca noktaya varan ve genellikle nokta bulutu
olarak tarif edilen söz konusu veri noktaları ile temsil edilmektedir.
|
|
 |
|
Şekil
4. Laser Tarama Mekanizmasının Şematik Görünümü
|
|
|
|
Şekil
5. Laser Sayısallaştırma Yöntemi
|
Parça
üzerinde taranan noktaların sayısı, parçanın büyüklüğüne ve
detaylarına bağlıdır. Çok detaylı parçaları tarif etmek için
daha fazla noktaya ihtiyaç duyulmaktadır.
Laser
tarama teknikleri geleneksel tekniklerden daha hızlı veri
toplayarak sayısallaştırma proseslerini kısaltmaktadır. Lazerle
tarama, kosinüs hatalarından, mekanik prob ofsetlerinden ve
prob büyüklüğü ile şeklinden doğan sorunları elimine etmektedir.
Laser
ile tarama yapmanın birinci avantajı, prosesin dokunmasız,
hızlı ve koordinat lokasyonlarının direkt olarak taranan obje
geometrisi üzerine düşen ışından alınması olayıdır. Bu özellik,
hassas ve kırılgan parçaların ölçülmesi ve özellikle taranan
koordinat lokasyonlarının, yüzey koordinatları boyunca spline
eğrileri veya yüzey oluşturmada, CAD/CAM uygulamaları için
kullanışlı olmasını sağlamaktadır (7).
Laser
ışığının yüksek çözünürlüğü ve ince ışını sayesinde, aynı
zamanda, mekanik probların giremeyeceği detaylı yüzey geometrilerinden
istenilen hassasiyette veri alınması sağlanmaktadır. Bu sebeple,
otomotiv, uzay, tıp, spor ekipmanları ile oyuncak, elektronik
ve mücevher sanayiinde sıkça kullanılmaktadır.
SONUÇLAR
ve DEĞERLENDİRMELER:
Tüm
laser tarama tekniklerinde, ışık kaynağı olarak birer laser
ışını kullanılmaktadır. Ancak, bu tür ışık kaynakları bazı
objeleri sayısallaştırmada her zaman için uygun düşmemektedir.
Projeksiyon metodunda ise, ışık kaynağı olarak kesinlikle
güvenli olan sıradan halojen beyaz ışık kullanılmaktadır.
Laser
tarama teknikleri kullanılarak elde edilen ilk veri bir nokta
veya bölge profili olabilmektedir. Bir nesnenin tüm yüzeyini
kaplamak için mekanik ve optik tarayıcılar birlikte kullanılabilmektedir.
Bu ardışık veri toplama yönteminde genelde düşük veri toplama
hızları söz konusudur.
3D
sayısallaştırma tekniğinde, ışık projeksiyonu ile saniyede
300.000 (1 milyona kadar çıkabilir) nokta verisinin elde edilmesini
sağlayan paralel veri toplama tekniği uygulanmaktadır.
Laser,
yoğunlaştırılmış tek renkli ışık kaynağıdır. Laser tarama
tekniği benekler (speckle) yüzünden problem oluşturmaktadır.
Benekler, hatalı verinin ana kaynağı olup laser kaynağına
rastgele karışmasıyla problemlere neden olmaktadır. Bunlara
ilaveten, tek bir laser kaynağı kullanılarak renkli doku verisinin
yaratılması olanaksızdır. Laser tarama tekniğinde ikinci bir
kamera kullanılmasının nedeni, söz konusu renkli doku verisinin
yaratılma isteğine dayanmaktadır.
Izgara
projeksiyonu 3D sayısallaştırma metodunda, 3D geometrik ve
renkli doku datası için tek bir kamera kullanmaktadır. Buradaki
çift kameralı veri toplama metodu, doğru bir şekilde 3D geometrisiyle
ilişkili renkli doku haritasını oluşturmayı mümkün kılmaktadır.
Optik
ölçme gözönüne alındığında, çözünürlük ve tamlık arasındaki
farkın tanımlanması gerekmektedir. Çözünürlük, sensörün algılayabildiği
mesafedeki en küçük değişikliktir. Tamlık ise, taranan objenin
optik kalitesinin fonksiyonudur. Eğer obje mat bir yüzeye
sahipse, tamlık ve çözünürlük hemen hemen aynı olacaktır.
Eğer obje parlak bir yüzeye sahipse, laser ışını CCD üzerinde
parlayıp titreme oluşturmaktadır. Bu da, günümüzde, laser
verisinde kullanılan gelişmiş yazılımlarla artık filtre edilebilmekte
ve oluşan parazitler azaltılabilmektedir. Diğer taraftan parça
ışığı absorbe eden çok koyu renkte bir yüzeye de sahip olabilir.
Bu durumda, sensöre yeterli miktarda ışık dönemeyecektir.
Anılan dezavantajın ortadan kaldırılması için tarama işlemlerinden
önce, objelerin yüzeyleri sprey boyalarla açık gri tonlarda
ve ince tabakalar halinde boyanmalıdır (7).
İmalat
sırasındaki muayene işlemleri gözönüne alındığında, optik
ölçme cihazları için zaman döngüsünün kısa ve dolayısıyla
işlemin hızlı olmasından dolayı imalat hatlarındaki on-line
ölçümler için kullanılmaktadır. Optik ölçme cihazları ile
kaporta tetkiklerinde, parça yüzeyinin tümü taranmakta; böylelikle
alt ve ana montaj işlemleri daha başarılı bir şekilde gerçekleştirilebilmektedir.
Bununla birlikte, halen sanayimizde gerçekleştirilen İPK çalışmaları
için yaygın bir şekilde CMM'ler kullanılmaktadır. Çünkü bunların
ölçme prensibi, alınan vektörel ölçme verisinin sağladığı
tamlığa dayanmaktadır. Burada, optik ölçme cihazlarının kullanımından
duyulan başlıca kaygı ise, sağlayabilecekleri tamlık ve ölçme
tesirleri yönünden olmaktadır.
Tersine
mühendislik uygulamaları ile parça geliştirme ve tasarım faliyetleri
yönünden bakıldığında, iş parçalarının kameralar vasıtasıyla
görüntülenmesi suretiyle elde edilen sayısal verilerin söz
konusu işlemlerde pratik bir şekilde ve başarıyla kullanıldığı
görülmektedir. Ancak, sanayimizde bu tür ölçme cihazlarının
kullanımı henüz gereken ölçüde yaygınlaşmamıştır.
TEŞEKKÜR:
Makalenin
hazırlanmasında vermiş oldukları destekten dolayı Cadem A.Ş.
ve GOM International AG yetkililerine teşekkür ederiz.
KAYNAKÇA:
1.
Akdogan, A., Görür, B.V., Yurci, M.E., Durakbasa, M.N., "Comparsion
of Coordinate Measuring Machines Digitizing Capability and
an Optical Digitizer" WEISIC 2003, Proceedings of 4th
Workshop on European Scientific and Industrial Collaboration,
University of Miskolc, Hungary, 28-30 May, 2003, pp.261.
2.
www.cadem.com.tr/gom
3.
Broggiato, G.B., Campana, F., Gerbino, S., "Shape deviation
Analysis on Sheet-Metal Parts Through Reverse Engineering
Techniques", XII ADM International Conference-Italy-Sept.
5th-7th, 2001.
4.
www.opton.co.jp/techrep/md/md4/mde4.html
5.
www.gom.com
6.
Görür, B. V., "Kalıpta Biçimlendirilen Sac Parçaların
Geometrik Spesifikasyonları ile Biçim ve Boyut Sapmalarının
İncelenmesi", YTÜ Fen Bilimleri Enstitüsü, Yüksek Lisans
Tezi, Tez Danışmanı: Prof M. Emin YURCİ, 2003
7.
www.laserdesign.com/faq.htm
8.
www.appliedprecision.ca
|