2.
KATI MODELLEME ve SAYISAL AĞ ÇALIŞMALARI
Çalışmada
öncelikle orijinal durumun analizi yapılmış ve yapılan iyileştirmelerin
etkileri bu modele göre değerlendirilmiştir. Orijinal pompanın
katı modeli elimizde olmadığı için ilk olarak halihazırda
üretilen bir pompa geometrisi INFOTRON firması tarafından
taranmış ve katı model haline dönüştürülmüştür. Daha sonra
bu katı model baz alınarak analizlerde kullanılacak olan
akış hacmi oluşturulmuştur. Katı model hazırlama ve akış
hacmini elde etme adımları her yeni iyileştirme için tekrar
yapılmıştır. Katı model çalışmalarının hepsi sayın Cüneyt
Yıldız tarafından yapılmıştır. Şekil 1'de orijinal durumun
taranması sonucu elde edilmiş katı model ve bu model kullanılarak
elde edilmiş akış hacmi görülebilir.
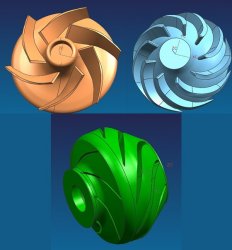
Şekil 1. Orijinal rotor ve stator geometrileri ve akış
hacmi
Bir HAD analizinin yapılabilmesi için katımodeli bulunan
akış hacminin sonlu sayıda ufak parçalara bölünmesi gerekmektedir.
Bu işleme sayısal ağ oluşturma işlemi sonucunda oluşan modele
de sayısal ağ veya sayısal model denir. Bu parçaların (elemanlar)
sayısı ne kadar küçük ise sonuçlar o kadar hassas olur.
Ancak bu parçaların sayısı analiz süresine de doğrudan etki
eder. Bu nedenle yüksek gradyenlerin olduğu bölgerde yoğun
diğer bölgelere daha seyrek elemanlar kullanılarak optimum
bir sayı bulunmak zorundadır. Yapılan analizlerin tümünde
eleman saysı kademe başına 850.000 civarında alınmıştır.
Yüksek gradyenlerin beklendiği kanat yakınlarında daha ufak
kanatlardan uzak bölgelerde daha büyük elemanlar kulanılmıştır.
Orijinal durum için oluşturulmuş sayısal ağa bir örnek Şekil
2'de görülebilir.
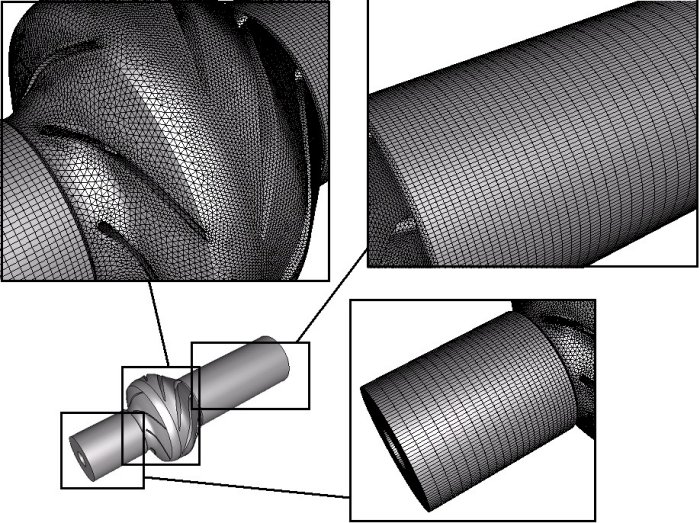
Şekil 2. Orijinal pompa için hazırlanmış sayısal ağdan
bazı görünüşler
İyileştirme
işlemleri sırasında toplam 8 ayrı model kullanılmıştır.
Bu modellerin her birinde farklı sadece tek değişiklik yapılmış
ve bunun sonucu gözlenmiştir. Her bir iyileştirme işlemi
için katı model ve sayısal ağ yeniden hazırlanmıştır.
3.
ANALİZ ÇALIŞMALARI
Sayısal ağ tabakası oluşturulduktan sonra sıra sınır şartlarının
tanımlanmasına ve çözüm ayarlarının yapılmasına gelir. Burada
dikkat edilmesi gereken birçok husus vardır. Bunlardan
başlıcaları sayısal model sınırlarında kullanılacak sınır
şartları ve arka planda yapılacak hesaplamalar için kullanılacak
sayısal yöntemlerdir. Model sınırları Şekil 3' te görülebilir.
Bütün modellerde benzer sınırlar kullanılmıştır.

Şekil 3. Model sınırları
Giriş sınırında pressure-inlet sınır şartı kullanılmış ve
değer olarak da 0 pa girilmiştir.
Çıkış sınırında pressure-outlet sınır şartı kullanılmıştır.
Burada ki değerler analizin amacına göre değişkenlik göstermektedir.
İyileştirme çalışmaları sırasında sağlıklı bir karşılaştırma
yapılabilmesi için çıkışlarda 16.3 m basma yüksekliğine
karşılık gelen 159615 pa değeri girilmiştir. Nihai geometriye
karar verildikten sonra orijinal durumla son durumun performans
eğrilerinin karşılaştırılabilmesi için 7,5 m ile 20 m arasında
değişik basma yüksekliklerine karşılık gelen geri basınç
değerleri kullanılmıştır.
Rotorun
dönüşünü modelleyebilmek için Moving Reference Frame yöntemi
kullanılmıştır. Bu yöntemde rotorun dönme hızı ve dönüş
ekseni verilerek dönme etkileri modellenebilmektedir. Yapılan
analizlerde rotorun dönme hızı için 2890 devir/dakika değeri
girilmiştir.
Modellerin
her biri birçok duvar sınır şartı da içermektedir. Duvarlardan
rotora ait olanların rotor ile aynı eksen etrafında ve aynı
hızda döndüğü, diğerlerinin ise durduğu kabul edilmiştir.
Ayrıca tüm duvarlara 0,1 mm ortalama pürüzlülük yüksekliği
ve 0,3 pürüzlülük katsayısı tanımlanmış böylece pürüzlülük
etkisi de hesaba katılmıştır.
Sınır
şartlarının yanı sıra hassas bir sayısal çözüm alabilmek
için çözüm sırasında kullanılacak sayısal yöntemlerinde
uygun seçilmesi gerekmektedir. Akışın türbülanslı olup olmadığı,
mazleme özellikleri ve çözücü ayarlarının doğru olarak belirlenmesi
analizin hassasiyeti açısından oldukça önemlidir.
Analizlerin
tümünde Standart K-Epsilon türbülans modeli kullanılmıştır.
Momentum ve türbülans denklemleri ikinci dereceden yaklaşımlar
kullanılarak ayrıklaştırılmıştır. Bu şekilde daha hassas
bir sonucun alınması amaçlanmıştır.
Analizler
sırasında malzeme olarak su kullanılmıştır. Suyun yoğunluğu
998,2 kg/m3, viskozitesi ise 0.001003 kg/m.s olarak alınmıştır
4.
SONUÇLAR ve DEĞERLENDİRMELER
Çalışmada
ilk olarak orijinal durumun analizi yapılmıştır. Yapılan
analiz modelin içinde her noktadaki hız ve basınç gibi değerleri
verdiğinden pompa içindeki akışı detaylı olarak incelemek
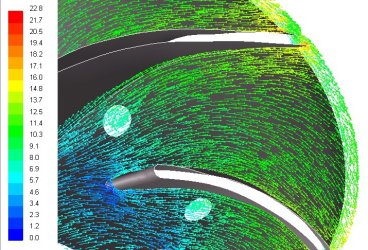
mümkün olmuştur. Orijinal durumun analizi sonucu rotor ve
stator içerisindeki bölgelerde elde edilen hız vektörleri
Şekil 4 ve Şekil 9'da görülmektedir.Yapılan incelemelerden
ana problemin statorda olduğu, rotorun nispeten yüksek performanslı
çalıştığı belirlenmiştir. Bu durum hız vektörleri incelenerek
de anlaşılabilir. Bu nedenle iyileştirme çalışmalarının
hepsi stator geometrisi üzerinde yapılmıştır. Toplamda 8
ayrı model denenmiş ve hepsi için analizler yapılarak yapılan
değişikliklerin benzer çalışma şartları altında performansı
ne kadar değiştirdiği belirlenmiştir. Değişikliklerde genel
olarak stator hub ve casing geometrisiyle oynanıştır. Son
olarak kanat geometrisi de değiştirilerek en yüksek performans
elde edilebilmiştir.
|
|
|
|
Şekil
4. Rotor hub geometrisinin 3 mm üstünde bulunan
bir yüzey üzerindeki göreceli hız vektörleri.
Renklendirme hız büyüklüğüne göre (m/s) yapılmıştır. |
Şekil
5. Rotor hub geometrisinin 6 mm üstünde bulunan
bir yüzey üzerindeki göreceli hız vektörleri.
Renklendirme hız büyüklüğüne göre
(m/s) yapılmıştır. |
|
|
|
|
Şekil
6. Rotor hub geometrisinin 10 mm üstünde bulunan
bir yüzey üzerindeki göreceli hız vektörleri.
Renklendirme hız büyüklüğüne göre
(m/s) yapılmıştır. |
Şekil
7. Stator hub geometrisinin 3 mm üstünde bulunan
bir yüzey üzerindeki hız vektörleri.
Renklendirme hız büyüklüğüne göre
(m/s) yapılmıştır. |
|
|
|
|
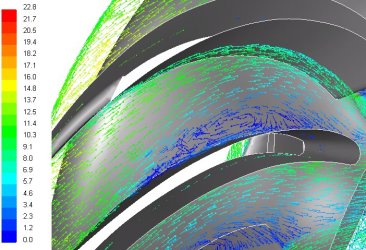
Şekil
8. Stator hub geometrisinin 6 mm üstünde bulunan
bir yüzey üzerindeki hız vektörleri.
Renklendirme hız büyüklüğüne göre (m/s) yapılmıştır.
|
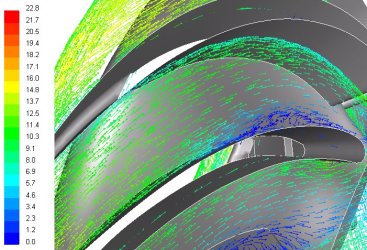
Şekil
9.
Stator hub geometrisinin 10 mm üstünde bulunan bir
yüzey üzerindeki hız vektörleri.
Renklendirme hız büyüklüğüne göre (m/s) yapılmıştır. |
Şekil
7 ve Şekil 9'dan da anlaşılabilceği üzere stator içindeki
bir bölgede ciddi bir akım ayrılması belirlenmiştir. Bu
ayrılmanın sebebinin stator kesitindeki ani ve oransız genişlme
olduğu belirlenmiştir. Bu nedenle ilk olarak stator hub
ve casing geometrisi düzeltilmeye çalışılmıştır. Bunun için
değişik 2 boyutlu analizler yapılıp bir hub ve casing geometrisi
belirlenmiş ve daha sonra bu geometri 3 boyutlu analizde
kullanılmıştır.